PolieBotics · TruthBeam. Patent pending.
You do not have to trust this repo. Recompute the headline AUROC = 1.000 yourself from ~2 MB
of published per-frame scores and an in-repo script - CPU-only, in seconds (it's a logistic-regression
probe over the published verifier scores, not a rerun of the model; Path A.5 regenerates those
scores from the public weights). Step by step: REPRODUCE.
Or run everything in one command - bash verify_all.sh - a clean-room check that, from a bare
machine, fetches only public URLs and verifies both Path A (the AUROC) and the temporal binding
(RSK-mainnet anchors + per-tx calldata + drand BLS), printing a pass/fail transcript. No private context.
All code, models, and data are public - nothing is gated. The verifier and forger code ship inside the verify bundle; the weights and video are directly downloadable; the scores and 378 GiB corpus are indexed by the manifests below (directory paths are not served as browsable listings on this host):
| Direct link | |
|---|---|
| 🧠 Verifier weights (39.8 M params) | https://data.truthbeam.com/models/verifier/model_final.pt |
| 😈 Forger checkpoints (F-A v1) | data.truthbeam.com/models/fa_v1_forger/f_a_v1_step_*.pt |
| 📊 Eval scores (reproduce input, ~2 MB) | data.truthbeam.com/models/repro/stage_0_eval/ (in the verify bundle; see REPRODUCE) |
| 💻 Verifier + forger code | inside truthbeam_verify.tar.gz (the code/verifier/ + code/recording/ trees) |
| 🗂️ 378 GiB ground-truth corpus | CIDs in CID_MANIFEST.json; download menu via download.sh and REPRODUCE (data.truthbeam.com/sessions/ is not a browsable listing) |
| ▶️ 2023 demo video | https://data.truthbeam.com/pinata/PolieBotics.mp4 |
Full reproduce + artifact table + scope guards: REPRODUCE · ARTIFACTS. The result is precisely scoped - one rig, two sessions, one performer - and it is a clean, unambiguous signal you can recompute end to end. The hard part is getting a full provenance pipeline to flow at all; that is done, and more rigs and performers follow from a flowing pipeline.
We'd rather pre-empt the hostile read than dodge it. Every answer below is checkable, not rhetoric.
models/fa_v1_forger/*.pt) plus the design/scaffolding for a
harder, verifier-aware F-A v2 family (models/fa_v2_surrogate_binders/; not trained, so no adaptive or
white-box robustness is claimed) - bring your own rig, performer, or forger and try to beat it. An independent reproduction is exactly the contribution we're asking for.PolieBotics builds tools that bind physical reality to cryptographically chained evidence. The premise: in an age of cheap synthetic media, a recording is only as good as your ability to check it. Rather than ask viewers to trust a camera, PolieBotics makes the act of recording leave physical, cryptographically-chained evidence that a later, independent party can re-derive and test.
The Truth Beam is the flagship of that idea. It is a projector-camera instrument: while it films a scene, it also projects a pattern onto that scene - a pattern that is derived, moment to moment, from the cryptographic hash of everything recorded so far. The camera therefore captures the world and a structured-light signature derived from this specific recording's own history. Tamper with a frame and the chain no longer reproduces - and, within the measured scope below, a learned verifier can tell.
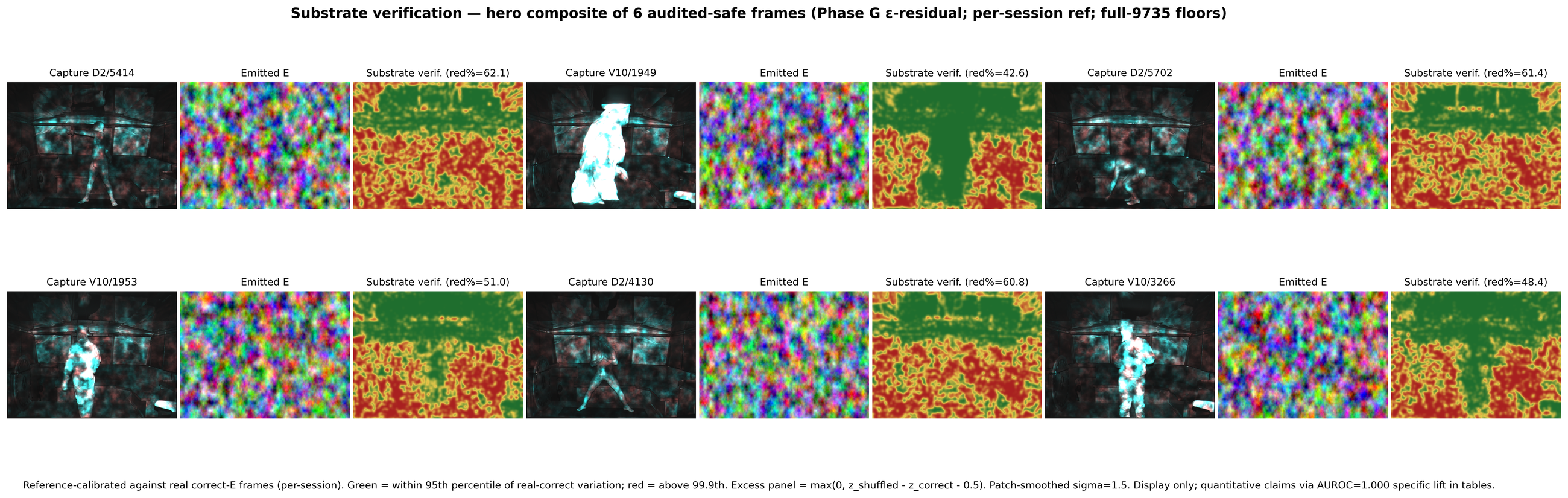
For every frame the system holds three things: the raw camera capture C, the emitted pattern E that was
projected onto the scene at that instant, and a substrate-verification map - the per-pixel diffusion residual,
calibrated against the per-session correct-E reference and shown as the excess over the calibrated threshold.
Green = below threshold (consistent); red = above (anomalous). This is a calibrated diagnostic visualisation,
not a raw classifier output; the quantitative claims are carried by the AUROC tables, not the colour of any single
panel.
The Truth Beam closes a loop: emit → project → capture → commit, frame after frame.
┌──────────────────────────── feedback loop ───────────────────────────┐
│ │
▼ │
chain state S_t ──BLAKE3-XOF──▶ emission E_t ──[projector]──▶ the scene │
▲ (a deterministic, │ │
│ unpredictable pattern) [camera] │
│ │ │
S_{t+1} ◀────fold in BLAKE3(C_t)──── commit ◀──── raw capture C_t ─────────┘
anchored outward: S_t ⇄ drand beacon (public time) + Rootstock / RSK (public ledger)
verify: a learned verifier scores the pair (C_t, E_t)
→ low residual = genuine, chain-coupled capture
→ high residual = forged, mismatched, or substituted frame
S_t - a 32-byte BLAKE3 hash that is the recording's running memory of everything captured so far.E_t - the projected pattern, expanded deterministically from S_t via BLAKE3 in extendable-output
(XOF) mode. Unpredictable without the chain, but fully reproducible with it.C_t - the raw 8-bit BayerRG8 frame the camera records while E_t is lit on the scene.BLAKE3(C_t) is folded back into the next state S_{t+1}, so each frame cryptographically depends on
the actual pixels captured. Change a capture → change every downstream state and emission → detectable.E via a ControlNet-style hint) scores how well a capture matches its chain-coupled emission. A genuine pair
yields a low noise-prediction residual; a forged or mismatched one yields a high residual.On top of that substrate this repository also includes an emission-recovery binder (reconstructs Ê from C)
and a red-team attacker (a trained forger, F-A v1) used to stress-test the verifier.
The load-bearing claim of the Truth Beam is not "this image is real," and not only "a learned model flags the forgery." It is that the projection binds the physical interaction in time - and the binding separates cleanly into what is checkable offline and what is checkable against public networks:
S_N equals the value committed in the anchor. Change, drop, or
reorder any frame and every later emission diverges. (This re-walk does not, by itself, establish the
external clock.)S_0 folds in a freshly-waited RSK
mainnet block (the recorder waits for the next block after wall-time T), so the session could not
have been produced before that block existed. drand quicknet rounds folded through the chain add a
publicly BLS-verifiable per-round freshness floor (≈ one round / 3 s). You cannot pre-render footage
to match a challenge that did not yet exist.S_N in a mainnet block, so the record demonstrably existed by that block's timestamp once the
transaction is confirmed - no silent back-dating.Together these bind the recording to the window [anchor_start, anchor_end] as a live light-in/light-out interaction. The bound is the window between anchors, not a per-frame wall-clock; it proves when, and that the interaction was live and ordered - not the semantic truth of what was staged.
This is demonstrated, not asserted. For both released sessions the anchors were looked up live on RSK mainnet and the drand rounds BLS-verified, each session bound to an independent on-chain window:
| D2 | V10 | |
| UTC window (2026-04-25) | 02:07:48 → 02:48:47 | 05:10:29 → 05:35:53 |
| duration | 2459 s | 1524 s |
| RSK anchor blocks | 8768852 → 8768945 | 8769289 → 8769357 |
| drand rounds (quicknet) | 28093180 → 28093983 | 28096824 → 28097325 |
| commit rate | 2.496 Hz | 2.494 Hz |
Full
results + one-command reproduction: TEMPORAL_VERIFICATION. The
external-clock checks run against public RSK/drand (verify_*.py --online); the ordering + tamper-evidence
are the GPU-free offline re-walk (REPRODUCE). Either way, the time-binding stands
independently of the learned verifier - which is the secondary, empirical layer that scores physical
optical coupling on top.
Scope (please read). Every quantitative result here is within-session / same-rig: one projector-camera apparatus, one human performer, two sessions (D2 = "Yoga", V10 = "AI-improv"). Nothing here establishes cross-rig, cross-camera, cross-projector, or cross-subject generalisation, and headline AUROC = 1.000 figures are finite-sample, held-out estimates (D2 n=198, V10 n=200), not zero-error proofs. The one trained attacker is F-A v1 - a serious but non-adaptive, same-rig surrogate; the stronger verifier-aware attacker F-A v2 is design-only (not trained), so no adaptive / white-box robustness is claimed. Much of the verifier's discrimination also lives in off-body, scene-coupled signal (optics, projection, sensor), so this is a rig/corpus provenance result, not evidence of general person-level forgery detection.
License. All rights reserved. No open-source licence and no patent licence are granted (see
LICENSE). The code and paper are published so the work can be read, reviewed, and independently verified; publication grants no licence and no rights beyond those arising by law. Verifying and reproducing the published results is welcome and needs no permission; any other use (redistribution, derivative works, commercial use, or a patent licence) requires a licence - contact the author (xathal@protonmail.com).
paper/ the whitepaper - reader PDF (main.pdf) plus the full LaTeX source
(main.tex, sections/, refs.bib, figures/), so the text is directly
machine-parseable without OCR. The patent filings live in the companion
PolieBotics repo (github.com/poliebotics/PolieBotics, reality_kernel/).
code/
verifier/ the verification stack (src/ + scripts/): Phase G/F/H, binders, red-team
recording/ the projector-camera rig protocol that recorded the sessions
(chain, S_0 derivation, tile generators, third-party verifier in verify/)
results/
eval/ held-out eval-output summaries (the headline numbers)
+ exp6_correct_e_rank/ (per-frame ranking raw data)
redteam_segmentation_evals/ red-team / segmentation / EXP-7 / excess-red summaries
csv/ visual_metrics_wide.csv (frame-level metric table,
9,735×33) + the in-sample candidate-ranking artifact
recovery/ reconstruction of the 2023 trailer's lost emission block
docs/ data/model publishing plan, reproducibility checklist, claim-check audit trail
pip install -r requirements.txt # quick install (unpinned); for the exact tested
# training environment use requirements-lock.txt
# verify a released session bundle (no GPU needed):
python3 code/recording/verify/verify_generator_hash.py <session_dir> # code → hash
python3 code/recording/verify/verify_v9.py --session-dir <session_dir> # D2 (v9 chain)
python3 code/recording/verify/verify_v10.py --session-dir <session_dir> # V10 (v10 chain)
# fastest end-to-end check - chain math only, needs ~4 MB of metadata, no bulk data:
python3 code/recording/verify/verify_v9.py --session-dir <session_dir> --logs-only
python3 code/recording/verify/verify_v10.py --session-dir <session_dir> --logs-only
The Phase-G verifier training/eval scripts (code/verifier/) assume a CUDA GPU; the recording-verification path
above is CPU-only. Research scripts take data paths as arguments (see each --help); absolute paths in this
snapshot are placeholders.
Each released session is tamper-evident: every frame is committed under a BLAKE3 state chain whose genesis hash
S_0 commits to - among the session nonce, an RSK block hash, and the drand beacon - a digest of the
tile-generator source code (generator_code_hash). The loop is verifiable from this repository plus the
released session data:
python3 code/recording/verify/verify_generator_hash.py <session_dir> recomputes
generator_code_hash from code/recording/protocol/tile_gpu.py (no GPU) and compares it to the session's
verification_bundle.json. For both released sessions this is
154be9dd75e0586df456a7eae1528b7334a415f3a977a107c91c6b0751bfc540 and it matches this repository's source.python3 code/recording/verify/verify_v9.py --session-dir <session_dir> (session D2,
v9 chain) or python3 code/recording/verify/verify_v10.py --session-dir <session_dir> (session V10, whose
v10 chain additionally folds a 32-byte ai_payload_root into each transition under TB:ROW:v10) recomputes
S_0 and walks the chain row by row against chain_log.csv and the captured frames - including the
terminal-state check (computed S_N must equal the manifest's RSK-anchored S_N_hex). Add --logs-only to
verify the chain math from the chain log + manifest alone (~4 MB, no raw frames needed).anchor_txs.csv) and pinned to drand rounds, so
the recording's time window is externally attested. Steps 2-3 use the separately released session bundles (see
the data plan).results/eval/*.json and the metric CSVs; the recovered red-team /
segmentation / EXP-6 / EXP-7 / excess-red summaries are in results/redteam_segmentation_evals/.docs/DATA_MODEL_PUBLISHING_PLAN.md and
RESTORE.md. Cloudflare R2 is the system of record for the bulk artifacts.This system is patent-pending, inventor/applicant Cathal Ryan Hynes: the parent application is published
as WO 2025/046153 A2 (Methods and Apparatus for Projector Camera Systems, PCT/EP2024/080780), with PIGMIE
Filing 1 & Filing 2 pending. The filings (the Reality Kernel, under reality_kernel/) are published in the
companion PolieBotics repository:
poliebotics/PolieBotics. Publication reserves all patent
rights; no licence, express or implied, is granted under the patent (see LICENSE).
Both sessions feature a single identifiable human performer - the author/operator himself, who consents to the
publication of his own likeness. The ethical-display rules in the paper are applied throughout (common thresholds for
real/altered panels, no per-frame normalization, no body suppression, diagnostics labelled). Release of the raw
capture corpus is governed separately by docs/DATA_MODEL_PUBLISHING_PLAN.md.
This work was verified against its own code and eval outputs, not against the paper's prose.
docs/verification_ground_truth.json and docs/whitepaper_claim_check.json record what was checked, what is backed,
and the explicit do-not-claim boundaries. These are point-in-time (2026-06-01) records - read them alongside
docs/RELEASE_NOTE_ON_AUDIT_ARTIFACTS.md, which explains that the
training host has since been retired (R2 is now the system of record) and that the eval outputs they flagged as
"on Lambda" were recovered into results/redteam_segmentation_evals/. Known limitations are stated in the paper's
Discussion.
See CITATION.cff (in the source repository). Cite the paper and the patent.
All rights reserved. No open-source licence, and no patent licence - express or implied - is granted under
the pending patent. See LICENSE. The artifacts are published so the work can be read, reviewed, and
independently verified; publication grants no licence and no rights beyond those arising by law. For commercial or
any other reuse, contact the author (xathal@protonmail.com).
Published as a stable snapshot (mid-2026). The author is moving on to other work for the next few months, so issues, PRs, and email may go unanswered for a while - by design, not neglect: everything here is built to be checked without us. Recompute the result (REPRODUCE), re-walk the chain, and verify against the filings, dataset, and video yourself.
Independent reproduction is the contribution we most want. Pull the open data, run the reproduce paths, and - the real test - bring your own rig, performer, or forger and try to break it. Re-implementations, forks, and collaboration are explicitly welcome while we're heads-down elsewhere.
Direction. This single-rig release is the foundation. The filings describe and enable a larger cross-rig witness mesh - several Reality Kernel modules cross-checking one shared record - and the intent, over time, is to open a public standard and reference modules and to work with other researchers, so independent instruments can interoperate and verify each other. None of that is claimed as done here; it is the trajectory and the open door.
This page is an LLM-mediated dataset: the same content as README.md, written to be parsed and re-presented by an LLM - point yours at it to explain or check. The prose is LLM-generated, so for load-bearing claims verify against the code, dataset, and whitepaper, not the summary (see REPRODUCE.md).